
MIL-STD-1553 facts for kids
MIL-STD-1553 is like a special language that different parts of an airplane use to talk to each other. It's mostly used in US military aircraft, but you can find it in other places too. This system uses special cables that connect all the parts. This way, if one part is removed or stops working, the rest of the network can keep going without problems.
Think of it like a team working together. Each part has a specific job:
- Bus Controllers: These are the "bosses" of the network. They decide when information should be sent and received. Usually, there's one main boss, but sometimes there can be a few.
- Remote Terminals: These are the "doers." They listen to the Bus Controller and do what they're told. For example, they might control a specific part of the plane, like a sensor or a wing flap.
- Bus Monitors: These are the "listeners." They usually just listen to all the conversations happening on the network. They don't talk back unless something special happens. A Bus Monitor can't be directly told what to do by the Bus Controller. Sometimes, a Bus Monitor is ready to take over as the "boss" if the main Bus Controller has a problem, so communication doesn't stop.
Contents
How Many Devices Can Connect?
The devices in this network are spread out all over an aircraft. The "doers" (Remote Terminals) are placed where their job needs to be done. The "boss" (Bus Controller) is often in a more central spot.
You always need at least one Bus Controller and at least one Remote Terminal for the network to work. The system can handle up to 30 Remote Terminals. There's no limit to how many Bus Monitors you can have because the Bus Controller doesn't need to talk to them directly.
How Does This Communication System Work?
The Bus Controller always starts the conversation. It might talk to just one part, a few parts, or even all the parts at once.
Here's how it happens: 1. The Bus Controller decides what information to send. 2. It sends this information to a special device that handles communication. 3. This device changes the information into a special signal called a "Manchester Encoded signal." 4. This signal is then sent through the physical cable.
All the Remote Terminals on the network can "hear" this signal at almost the same time. Each Remote Terminal then decides if the message is for them and if they need to do something. For example, a message might tell a part to "turn off" or to "report how you are doing."
It's very important that only one device talks on the network at a time. If two devices try to talk at the same time, it's called a collision, and no one can understand the message.
Quick Facts About MIL-STD-1553
- Speed: This system can send information very fast, about 1 million bits every second!
- Messages: Communication is organized into "messages." When the Bus Controller talks to one Remote Terminal and that Terminal replies, that's one type of message. When the Bus Controller talks to everyone at once, that's a different type. There are 10 different kinds of messages in total.
- Words: Messages are broken down into smaller pieces called "words." There are three types of words:
- Command word: Used by the Bus Controller to start a message.
- Status word: Used by a Remote Terminal to reply to the Bus Controller.
- Data word: Used by both the Bus Controller and Remote Terminals to send actual information.
- Timing: Each word takes only 20 microseconds (that's 20 millionths of a second!) to travel on the network.
- The first 3 microseconds tell the device what kind of word it is.
- The next 16 microseconds are for sending the actual information.
- The last microsecond is for a special "parity bit." This bit helps check if the word got mixed up or garbled during transmission.
What Else Should You Know?
The rules for MIL-STD-1553 are like giving someone a box of LEGO blocks without any instructions. The rules tell you what the blocks can do, but not what to build with them. Because of this, different groups have used these "LEGO blocks" to build systems that work in slightly different ways or don't always work perfectly together.
Images for kids
-

Figure 6: How information is sent
-

Figure 7: How broadcast information is sent
-
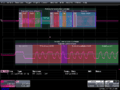
A Remote Terminal (RT) sending data to a Bus Controller (BC)
-
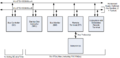
Figure 1: Example of a MIL-STD-1553B network
-

Figure 9: How devices connect using transformers
-
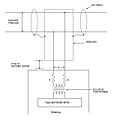
Figure 10: How devices connect directly






See also
 In Spanish: MIL-STD-1553 para niños
In Spanish: MIL-STD-1553 para niños
