
Deformation (physics) facts for kids

| Mechanics | ||||||||||

|
||||||||||
Imagine you have a rubber band. When you pull it, it changes shape and size. This change is called deformation. In science, deformation is when an object changes from its original shape or position to a new one.
Objects can deform for many reasons. They might be pushed or pulled by forces, like when you stretch that rubber band. Changes in temperature, like a metal expanding when it gets hot, can also cause deformation. Even things like gravity or chemical reactions can make an object deform.
Strain is closely related to deformation. It tells us how much the tiny parts inside an object move relative to each other, not just how the whole object moves. Think of it as how much an object is stretched, squished, or twisted, without counting if the whole object just moved from one place to another or spun around. Strain doesn't have units; it's usually shown as a percentage or a small fraction.
When an object deforms, it's usually because of forces pushing or pulling on it, or changes like temperature. How much an object deforms depends on what it's made of. For example, a rubber band stretches easily, but a steel bar doesn't. This relationship between the forces and the deformation is described by special rules, like Hooke's law for stretchy materials.
Some deformations are temporary. If you stretch a rubber band and then let go, it snaps back to its original shape. This is called elastic deformation. The object completely recovers. But some deformations are permanent. If you bend a paperclip too much, it stays bent. This is called plastic deformation. It happens when the forces are strong enough to permanently change the material, like when metal is bent past its "elastic limit." Another type of permanent change is viscous deformation, which happens in gooey or thick materials over time, like honey slowly spreading out.
Contents
What is Deformation?
Deformation is simply the change in an object's shape or size. It's like comparing a picture of something before it changed to a picture of it after it changed. We often think of an object's starting shape as its "reference" or "undeformed" shape, and its new shape as its "current" or "deformed" shape.
When scientists study deformation, they don't usually worry about time. They just look at the starting shape and the ending shape.
There are two main ways to describe how an object deforms:
- Material description: This focuses on what happens to specific points inside the object as they move from their original spots.
- Spatial description: This looks at what happens at specific locations in space as the object deforms and moves through them.
An object deforms in a continuous way. This means that if you draw a closed line on an object, it will still be a closed line after the object deforms. Also, if you imagine a closed surface around a part of the object, the material inside that surface will stay inside it, even after deformation.
How Objects Deform Evenly
Sometimes, an object deforms very smoothly and evenly. This is called an affine deformation or homogeneous deformation. It means every part of the object deforms in the same way, like a perfect stretch, squish, or twist, plus maybe a simple slide or spin.
An example of this is a rigid body motion. This is a special kind of deformation where the object moves (slides or spins) but doesn't change its shape or size at all. Think of picking up a book and moving it to a different spot on your desk – its shape doesn't change.
Understanding Strain
Strain tells us how much the tiny parts within an object stretch, squish, or twist compared to their original size. It helps us understand the internal changes happening during deformation.
Strain is a number without units, often shown as a decimal or percentage. It measures how much a deformation is different from just moving the whole object without changing its shape.
We can break down strain into two main types:
- Normal strain: This is about stretching or squishing. It measures how much a line or fiber within the material gets longer (tensile strain) or shorter (compressive strain).
- Shear strain: This is about twisting or sliding. It measures how much the angles between lines in the material change, especially if they were originally at a right angle.
To fully understand the strain at any point in an object, we need to know both the normal strain (stretching/squishing) and the shear strain (twisting/sliding) in different directions.
How Do We Measure Strain?
How we measure strain depends on how much the object deforms:
- Large Strain Theory: Used when objects deform a lot, like rubber bands or soft tissues. Here, the original and deformed shapes are very different.
- Small Strain Theory: Used when objects deform only a little bit, like steel beams or concrete. In this case, we can assume the original and deformed shapes are almost the same.
- Large-Displacement/Rotation Theory: Used when objects move or spin a lot, but don't change their shape much.
For everyday materials like steel, which only deform a tiny bit, we often use something called engineering strain. But for materials that stretch a lot, like rubber, we need more complex ways to measure strain, such as "stretch ratio" or "logarithmic strain."
Engineering Strain: Simple Stretching
Engineering strain is the most common way to measure how much something stretches or squishes. It's calculated by taking the change in length and dividing it by the original length.
So, if a wire was 10 cm long and stretched to 11 cm, the change in length is 1 cm. The engineering strain would be 1 cm / 10 cm = 0.1, or 10%.
- If the length increases, it's a positive strain (tensile strain).
- If the length decreases, it's a negative strain (compressive strain).
Engineering shear strain measures how much an object twists or slides. Imagine a square that turns into a diamond shape. The shear strain is related to how much the corners change their angles.
Stretch Ratio: How Much Longer?
The stretch ratio is another way to measure how much something stretches. It's simply the final length divided by the original length.
- If a material doubles in length, its stretch ratio is 2.
- If it doesn't deform at all, the stretch ratio is 1.
This measure is very useful for materials that can stretch a lot, like elastomers (think of elastic bands). These materials can have stretch ratios of 3 or 4 before they break!
True Strain: Step-by-Step Stretching
The logarithmic strain, also called true strain, is a more accurate way to measure strain, especially when deformation happens in many small steps. It's like adding up all the tiny stretches along the way. It's calculated using the natural logarithm of the stretch ratio.
What is Displacement?

When an object changes its position or shape, we call this a displacement. Displacement has two parts:
- Rigid-body displacement: This is when the whole object moves or spins without changing its shape or size. Like sliding a book across a table.
- Deformation: This is when the object actually changes its shape or size. Like bending that book.
If the parts inside an object move relative to each other, then deformation has happened. If they don't move relative to each other, it's just a rigid-body displacement.
The displacement vector is an arrow that shows how far a specific point on an object moved from its original spot to its new spot. The displacement field is a map that shows the displacement vector for every single point in the object. This map helps scientists understand how the object deforms.
Examples of How Things Deform
Scientists often study simple, even deformations to understand how materials behave. Here are a few examples:
- Uniform Extension: Stretching an object evenly in one direction, like pulling on a rope.
- Pure Dilation: An object getting bigger or smaller evenly in all directions, like a balloon inflating or deflating.
- Equibiaxial Tension: Stretching an object evenly in two directions at once, like stretching a piece of fabric in both width and length.
- Simple Shear: When layers of a material slide past each other, like pushing the top of a deck of cards so it slants.
- Pure Shear: A more complex type of shear where the object changes shape but not volume.
Plane Deformation: Flat Changes
Sometimes, deformation happens only in a flat plane. This is called plane deformation or plane strain. Imagine a thin sheet of metal that you bend or stretch only within its flat surface, without changing its thickness.
Volume-Preserving Plane Deformation
If a plane deformation happens without changing the object's volume, it's called isochoric plane deformation. This means that even though the shape changes, the total space the object takes up stays the same.
Simple Shear: Sliding Layers
A simple shear deformation is a type of volume-preserving plane deformation. In this case, some lines within the material don't change their length or direction at all, while other parts slide past them. Think of a stack of papers. If you push the top paper sideways, the whole stack slants, but the individual papers don't stretch or shrink.
Images for kids
-
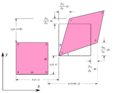
This diagram shows how a small square of material (left) can deform into a new shape (right) due to normal and shear strains.

- The bending of long objects like beams or studs is called deflection.
- Euler–Bernoulli beam theory
- Deformation (engineering)
- Finite strain theory
- Infinitesimal strain theory
- Moiré pattern
- Shear modulus
- Shear stress
- Shear strength
- Stress (mechanics)
- Stress measures
See also
 In Spanish: Deformación para niños
In Spanish: Deformación para niños
