
Curiosity (rover) facts for kids
Quick facts for kids Curiosity |
|
|---|---|
| Part of Mars Science Laboratory | |

Self-portrait by Curiosity at the foot of Mount Sharp in October 2015
|
|
| Type | Mars rover |
| Manufacturer | Jet Propulsion Laboratory |
| Technical details | |
| Dimensions | 2.9 m × 2.7 m × 2.2 m (9 ft 6 in × 8 ft 10 in × 7 ft 3 in) |
| Dry mass | 899 kilograms (1,982 lb) |
| Power | MMRTG: ~100 W (0.13 hp) |
| Instruments | |
|
|
The Curiosity rover is a car-sized robot exploring Mars. It is part of NASA's Mars Science Laboratory (MSL) mission. Curiosity landed in Gale crater on Mars on August 6, 2012. It was launched from Cape Canaveral on November 26, 2011. The landing spot was named Bradbury Landing.
The main goals of the mission are to study Mars' climate and geology. Scientists want to know if Gale crater ever had conditions suitable for tiny living things (microbes). They also study the role of water and prepare for future human missions to Mars.
In December 2012, Curiosity's original two-year mission was extended. On August 5, 2017, NASA celebrated its fifth anniversary on Mars. On August 6, 2022, a detailed report covered its first ten years. The rover is still working today.
The Curiosity team won the 2012 Robert J. Collier Trophy. This award recognized their amazing work in landing Curiosity and helping us understand Mars. The design of Curiosity also helped create NASA's 2021 Perseverance rover.
Contents
- What is Curiosity Looking For?
- Rover Design and Features
- Science Tools on Curiosity
- Mast Camera (MastCam)
- Chemistry and Camera Complex (ChemCam)
- Navigation Cameras (NavCams)
- Rover Environmental Monitoring Station (REMS)
- Hazard Avoidance Cameras (HazCams)
- Mars Hand Lens Imager (MAHLI)
- Alpha Particle X-ray Spectrometer (APXS)
- Chemistry and Mineralogy (CheMin)
- Dust Removal Tool (DRT)
- Radiation Assessment Detector (RAD)
- Dynamic Albedo of Neutrons (DAN)
- Mars Descent Imager (MARDI)
- Robotic Arm
- Curiosity in Culture and History
- Images for kids
- See Also
What is Curiosity Looking For?
The main science goals of the MSL mission are to find out if Mars could have ever supported life. Scientists also want to understand the role of water and study Mars' climate and geology. The mission also helps prepare for future human trips to Mars.
To do this, Curiosity has eight main science goals:
- Looking for Life
- Find out what kinds of organic carbon compounds are on Mars.
- Look for the chemical building blocks of life (carbon, hydrogen, nitrogen, oxygen, phosphorus, and sulfur).
- Find signs that show if living things were once there (like biosignatures).
- Studying Rocks and Soil
- Examine the chemicals, isotopes, and minerals in Mars' surface materials.
- Understand how rocks and soils formed and changed over time.
- Understanding Mars' Processes
- Study how Mars' atmosphere has changed over billions of years.
- Figure out where water and carbon dioxide are now and how they move around.
- Measuring Radiation
- Measure the different types of radiation on the surface. This includes radiation from space and from the Sun. This data is important for future crewed missions.
After about a year, scientists realized that ancient Mars could have supported microbial life. So, the mission also started to focus on how organic compounds are preserved.
How Curiosity Got Its Name
A NASA contest chose the name Curiosity. Over 9,000 ideas came in from students across the country. The winning name came from Clara Ma, a 12-year-old sixth-grader from Lenexa, Kansas.
As her prize, Clara visited NASA's Jet Propulsion Laboratory (JPL) in Pasadena, California. There, she signed her name directly onto the rover as it was being built.
Clara wrote in her winning essay:
Curiosity is an everlasting flame that burns in everyone's mind. It makes me get out of bed in the morning and wonder what surprises life will throw at me that day. Curiosity is such a powerful force. Without it, we wouldn't be who we are today. Curiosity is the passion that drives us through our everyday lives. We have become explorers and scientists with our need to ask questions and to wonder.
How Much Did Curiosity Cost?
Curiosity cost about US$3.2 billion (in 2020 money). This includes everything from design to its mission life. For comparison, the 2021 Perseverance rover cost about US$2.9 billion.
Rover Design and Features

Curiosity is much larger than previous Mars rovers. It is 2.9 m (9 ft 6 in) long, 2.7 m (8 ft 10 in) wide, and 2.2 m (7 ft 3 in) high. It weighs 899 kg (1,982 lb), including 80 kg (180 lb) of science tools.
Curiosity is NASA's fourth robotic rover sent to Mars since 1996. The others were Sojourner (1997), Spirit (2004–2010), and Opportunity (2004–2018).
- Power Source: Curiosity gets its power from a special generator called a radioisotope thermoelectric generator (RTG). This is similar to the power source used by the Viking 1 and Viking 2 Mars landers in 1976.
RTGs make electricity from the heat given off by radioactive isotopes, like plutonium-238. This gives Curiosity steady power day and night, and in all seasons. The heat also warms the rover's systems. Curiosity's RTG uses 4.8 kg (11 lb) of plutonium-238 dioxide.
The RTG is called the Multi-Mission Radioisotope Thermoelectric Generator (MMRTG). It was designed to produce 110 watts of electricity at the start of the mission. It also makes about 2,000 watts of heat. Over time, as the plutonium decays, the power slowly drops. The MMRTG makes much more energy each day than the solar panels used by older rovers. This energy charges two rechargeable lithium-ion batteries. These batteries help when the rover needs extra power for its activities.
- Cooling System: Mars' temperatures change a lot. Curiosity has a system to keep its parts at the right temperature. It uses fluid pumped through 60 m (200 ft) of tubing inside the rover. This system can warm the rover when it's cold or cool it down when it's too hot.
- Computers: Curiosity has two identical main computers called Rover Compute Elements (RCE). They have special memory that can handle the harsh radiation in space. They run a real-time operating system called VxWorks. Each computer has 256 megabytes (MB) of memory and 2 gigabytes (GB) of flash memory.
The computers use a RAD750 Central processing unit (CPU). This CPU is much faster than those on older Mars rovers. One computer is a backup, ready to take over if the main one has problems. In 2013, NASA had to switch to the backup computer because of an issue with the main one's memory.
The rover also has an inertial measurement unit (IMU). This helps it know its position for navigation. The computers constantly check the rover to keep it working, like controlling its temperature. Scientists send commands to the rover for tasks like taking pictures or driving.
How Curiosity Communicates

Curiosity has several ways to communicate. It has a radio that can talk directly to Earth. It also has a Ultra high frequency (UHF) radio to talk to Mars orbiters. Communicating through orbiters is the main way to send data back to Earth. This is because orbiters have more power and bigger antennas, allowing for faster data transfer.
Signals between Earth and Mars take about 14 minutes to travel one way. Curiosity can send data directly to Earth at up to 32 kilobits per second. But most data goes through the Mars Reconnaissance Orbiter and Odyssey orbiter. Data speeds through these orbiters can be much faster. However, each orbiter can only talk to Curiosity for about eight minutes a day.
The Jet Propulsion Laboratory (JPL) is the main place where data is sent and received. When Curiosity landed, three orbiters helped monitor its descent: the 2001 Mars Odyssey, Mars Reconnaissance Orbiter, and ESA's Mars Express satellite.
How Curiosity Moves

- Mobility Systems: Curiosity has six wheels, each about 50 cm (20 in) wide. They use a special rocker-bogie suspension system. This system helps the rover climb over rocks and move through soft sand. Each wheel can move and steer on its own. This allows the rover to turn in place.
Each wheel has a unique pattern of cleats. This pattern helps with grip and leaves tracks in the Martian sand. The rover's cameras use these tracks to figure out how far it has traveled. The pattern is actually Morse code for "JPL" (·--- ·--· ·-··).
Curiosity can climb sand dunes with slopes up to 12.5 degrees. It can also handle tilts of at least 50 degrees without tipping over. However, sensors stop the rover if it tilts more than 30 degrees for safety. After six years, the wheels showed signs of wear, with punctures and tears.
The rover can drive over obstacles up to 65 cm (26 in) high. Its maximum speed is about 200 m (660 ft) per day using automatic navigation. It can travel up to 90 m (300 ft) per hour, but its average speed is about 30 m (98 ft) per hour. The rover is controlled by a team of operators at JPL.
Landing on Mars
Curiosity landed in an area called Quad 51, nicknamed Yellowknife, inside Gale crater. The landing site was named Bradbury Landing after science fiction writer Ray Bradbury. Gale crater is very old, about 3.5 to 3.8 billion years old. Scientists believe it was once filled with sediments, first by water, then by wind. Over time, wind erosion carved out these sediments, leaving a 5.5 km (3.4 mi) tall mountain called Aeolis Mons ("Mount Sharp") in the center of the 154 km (96 mi) wide crater.
This means Curiosity can study billions of years of Mars' history by examining the layers of rock on Mount Sharp. The landing site is also near an alluvial fan, which might have been formed by flowing groundwater.
How the Rover Landed
Older NASA Mars rovers only became active after they had successfully landed. Curiosity, however, was active as it touched down on Mars. It used its suspension system for the final landing.
Curiosity was lowered from its spacecraft by a 20 m (66 ft) tether using a "sky crane" system. It landed gently, wheels first, on the surface of Mars. After landing, it waited two seconds to confirm it was on solid ground. Then, small explosives cut the cables, freeing the rover from the descent stage. The descent stage then flew away and crashed safely. Curiosity was then ready to begin its science mission.
How Far Has Curiosity Driven?
As of July 22, 2024, Curiosity has driven 32.06 km (19.92 mi) from its landing site. It has been active for 4246 sols (Martian days).
Test Rovers on Earth
_Rover_(PIA15876).jpg)

Curiosity has two full-sized test versions on Earth. These are called Vehicle System Test Beds (VSTB). One is named MAGGIE (Mars Automated Giant Gizmo for Integrated Engineering), which has a computer brain. The other is Scarecrow, which does not have a computer brain. They are kept at the JPL Mars Yard. Scientists use them to test things and solve problems on a simulated Mars terrain.
Science Tools on Curiosity

Curiosity has many advanced science tools. Here's how it generally works: First, high-resolution cameras look for interesting features. If a rock looks promising, Curiosity can use a laser to vaporize a tiny part of it. Then, it examines the light given off to find out what elements are in the rock. If it's still interesting, the rover uses its robotic arm to move a microscope and an X-ray spectrometer closer. If more study is needed, Curiosity can drill into the rock. The powdered sample is then sent to the Sample Analysis at Mars (SAM) or CheMin labs inside the rover.
In total, Curiosity has 17 cameras: 8 HazCams, 4 NavCams, 2 MastCams, 1 MAHLI, 1 MARDI, and 1 ChemCam.
Mast Camera (MastCam)

The MastCam system has two cameras that take color images and videos. They can capture true-color images at 1600×1200 pixels and video at 720p.
One MastCam is the Medium Angle Camera (MAC). It has a 34 mm (1.3 in) focal length and a 15-degree field of view. The other is the Narrow Angle Camera (NAC). It has a 100 mm (3.9 in) focal length and a 5.1-degree field of view. These cameras can focus on objects from 2.1 m (6 ft 11 in) to very far away. Each camera has eight gigabytes of memory, enough for over 5,500 raw images.
Chemistry and Camera Complex (ChemCam)


ChemCam combines two remote sensing tools: a laser-induced breakdown spectroscopy (LIBS) and a Remote Micro Imager (RMI) telescope. The LIBS uses a laser to vaporize a tiny bit of rock or soil up to 7 m (23 ft) away. Then, it studies the light from the vaporized material to find out what elements are present.
ChemCam can record over 6,000 different wavelengths of light. The RMI takes high-resolution images of the areas the laser targets. The first laser test on Mars was on a rock called N165 ("Coronation" rock) on August 19, 2012.

Curiosity has two pairs of black and white navigation cameras on its mast. They help the rover navigate on the ground. These cameras take 3-D images using visible light.
Rover Environmental Monitoring Station (REMS)
REMS measures the environment on Mars. It checks humidity, pressure, temperatures, wind speeds, and ultraviolet radiation. This weather station helps scientists understand Mars' climate and local weather. It also helps study how the surface and atmosphere interact.
Hazard Avoidance Cameras (HazCams)
The rover has four pairs of black and white hazard avoidance cameras, two in the front and two in the back. They help the rover avoid obstacles while driving. They also help safely position the robotic arm. These cameras take 3-D images and can map the terrain up to 3 m (9.8 ft) in front of the rover. This keeps Curiosity from crashing into unexpected objects.
Mars Hand Lens Imager (MAHLI)


MAHLI is a camera on the rover's robotic arm. It takes close-up, microscopic images of rocks and soil. MAHLI can take true-color images with very high detail. It has both white and ultraviolet Light-emitting diode (LED) lights. This allows it to take pictures in darkness or to see fluorescence.
Alpha Particle X-ray Spectrometer (APXS)
The APXS instrument shines alpha particles onto samples. It then measures the X-rays that come back. This helps determine what elements are in the samples. Curiosity's APXS was developed by the Canadian Space Agency (CSA).
Chemistry and Mineralogy (CheMin)



CheMin is a tool that uses X-ray diffraction and X-ray fluorescence. It can identify and measure the amounts of different minerals on Mars. The rover drills samples from rocks, and the fine powder goes into CheMin. X-rays are then shined on the powder. The way the X-rays bounce off tells scientists what minerals are there.
On October 17, 2012, at a spot called "Rocknest", CheMin analyzed Martian soil for the first time. It found minerals like feldspar, pyroxenes, and olivine. The soil was similar to weathered basaltic soils found near volcanoes in Hawaii.
Dust Removal Tool (DRT)


The Dust Removal Tool (DRT) is a motorized brush on Curiosity's arm. It cleans dust off rocks. The DRT was first used on a rock named Ekwir_1 on January 6, 2013.
Radiation Assessment Detector (RAD)
The RAD instrument measures the radiation levels inside the spacecraft during its trip to Mars. It also measures radiation on the surface of Mars. This data is important for future human missions. It helps scientists understand how much radiation astronauts would be exposed to.
Dynamic Albedo of Neutrons (DAN)
The DAN instrument uses neutrons to find out how much hydrogen, ice, or water is at or near the Martian surface. It sends out neutron pulses and then measures how long it takes for the neutrons to return. This helps detect water.
Mars Descent Imager (MARDI)

MARDI is a camera fixed to the front of Curiosity. As the rover descended to Mars, MARDI took color images. It started taking pictures from about 3.7 km (2.3 mi) above the ground down to 5 m (16 ft). It took four pictures per second for about two minutes. MARDI's images helped map the surrounding area and confirm the landing spot.
Robotic Arm



Curiosity has a 2.1 m (6 ft 11 in) long robotic arm. At the end of the arm is a turret with five tools that can spin around. The arm has three joints to extend and fold it. It weighs 30 kg (66 lb).
Two of the tools are the X-ray spectrometer (APXS) and the Mars Hand Lens Imager (MAHLI camera). The other three tools are for collecting and preparing samples: a drill, a brush, and tools for scooping, sieving, and portioning powdered rock and soil. The drill can make holes 1.6 cm (0.63 in) wide and up to 5 cm (2.0 in) deep. The arm can place the APXS and MAHLI on targets. It also collects powdered samples for the SAM and CheMin labs inside the rover.
Since 2015, the drill has had some electrical issues. In December 2016, a motor problem stopped the rover from moving its arm and driving. The team worked on the drill throughout 2017 and resumed drilling on May 22, 2018.
Curiosity in Culture and History

When Curiosity landed, live video from Mars was shown on NASA TV. Many people watched, and the NASA website was overloaded. About 1,000 people gathered in Times Square in New York City to watch the landing on a giant screen. Bobak Ferdowsi, a Flight Director, became famous online for his unique Mohawk hairstyle.
On August 13, 2012, U.S. President Barack Obama called the Curiosity team to congratulate them. He said, "You guys are examples of American know-how and ingenuity. It's really an amazing accomplishment."
Scientists at the Getty Conservation Institute use a smaller, portable version of Curiosity's CheMin instrument. This tool, called the X-Duetto, can examine ancient artworks without damaging them. It helps determine what materials they are made of.
Before the landing, NASA and Microsoft released a free game called Mars Rover Landing on Xbox Live. It let players simulate the landing sequence.


From 2009 to 2011, NASA let the public submit their names to be sent to Mars. Over 1.2 million names were etched onto a silicon plaque. This plaque is now on Curiosity's deck. A plaque with the signatures of President Barack Obama and Vice President Joe Biden was also installed. Clara Ma's autograph is also on the rover.
On August 6, 2013, Curiosity played "Happy Birthday to You" to celebrate its first Earth year on Mars. This was the first time a song was played on another planet.
On June 24, 2014, Curiosity completed one Martian year (687 Earth days). It had found evidence that Mars once had conditions suitable for microbial life. Curiosity's design was used for the Perseverance rover for the Mars 2020 rover mission. Some spare parts from Curiosity were even used in the new rover.
In 2018, drill samples from 2015 showed organic molecules like benzene and propane in 3-billion-year-old rocks in Gale crater.
Images for kids
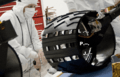
Components of Curiosity
-

Mast head with ChemCam, MastCam-34, MastCam-100, NavCam
-
One of the six wheels on Curiosity
-

High-gain (right) and low-gain (left) antennas
-

UV sensor




Example Rover Images
-
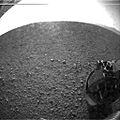
Curiosity's first image after landing (without clear dust cover, 6 August 2012)
-

Curiosity's self-portrait (7 September 2012; color-corrected)
-

Comparison of color versions (raw, natural, white balance) of Aeolis Mons on Mars (23 August 2012)
-

Layers at the base of Aeolis Mons. The dark rock in inset is the same size as Curiosity.





See Also
 In Spanish: Curiosity para niños
In Spanish: Curiosity para niños
- Experience Curiosity
- InSight
- Life on Mars
- Viking program
- Timeline of Mars Science Laboratory
- Mars Express
- 2001 Mars Odyssey
- Mars Orbiter Mission
- Mars Reconnaissance Orbiter
- Mars 2020
- Sojourner rover
- Spirit rover
- Opportunity rover
- Perseverance rover
- Rosalind Franklin rover
- Zhurong rover
- Comparison of embedded computer systems on board the Mars rovers
