
Exploration of Mars facts for kids
The exploration of Mars has been a very important part of space programs for many countries. These include the Soviet Union (now Russia), the United States, Europe, and Japan.
Contents
- How We Explore Mars
- Latest Missions to Mars
- A Look at Past Mars Missions
- Early Soviet Missions
- Mariner Program
- Viking Program
- Mars Pathfinder
- Mars Global Surveyor
- Mars Odyssey and Mars Express
- MER and Phoenix
- Mars Reconnaissance Orbiter
- Rosetta and Dawn Flybys
- Fobos-Grunt
- Curiosity Rover
- MAVEN
- Mars Orbiter Mission
- Trace Gas Orbiter and EDM
- InSight and MarCO
- Hope
- Tianwen-1 and Mars 2020
- Future Missions
- Human Missions to Mars
- Images for kids
- See also
How We Explore Mars
Since the 1960s, many robotic spacecraft have been sent to Mars. These include orbiters (which fly around the planet), landers (which sit on the surface), and rovers (which drive around).
Latest Missions to Mars


NASA's Mars Odyssey orbiter arrived at Mars in 2001. It found a lot of hydrogen in the top layer of Mars' soil. Scientists believe this hydrogen is part of large amounts of water ice.
The European Space Agency (ESA) sent its Mars Express mission in 2003. It carried a small lander called Beagle 2. Sadly, Beagle 2 was lost after it separated. However, it was found in 2015 by NASA's Mars Reconnaissance Orbiter. It had landed safely but its solar panels did not open fully. In 2004, Mars Express also found methane gas in the Martian atmosphere. In 2006, ESA announced they found aurorae (like the Northern Lights on Earth) on Mars.
In January 2004, NASA's two Mars Exploration Rovers, named Spirit and Opportunity, landed on Mars. Both rovers did much more than expected! They found clear proof that liquid water existed on Mars a long time ago. Sometimes, dust devils (small whirlwinds) cleaned their solar panels. This helped them last much longer. Spirit stopped working in 2010 after getting stuck in a sand dune.
On March 10, 2006, NASA's Mars Reconnaissance Orbiter (MRO) arrived. It started mapping Mars' surface and weather. This helps find good landing spots for future missions. In 2008, MRO took the first pictures of active avalanches near Mars' north pole.
The Mars Science Laboratory mission launched in 2011. It delivered the Curiosity rover to Mars on August 6, 2012. Curiosity is much bigger and more advanced than the older rovers. It can move up to 90 meters per hour. It has a special laser that can figure out what rocks are made of from 7 meters away.
The Indian Space Research Organisation (ISRO) launched its Mars Orbiter Mission (MOM) on November 5, 2013. It successfully entered Mars' orbit on September 24, 2014. India became the fourth space agency to reach Mars. It was also the first country to succeed on its very first try!
The ExoMars Trace Gas Orbiter arrived at Mars in 2016. It also released the Schiaparelli EDM lander. This lander partly succeeded, sending data during its fall, but it crash-landed.
A Look at Past Mars Missions
This section gives a quick overview of missions that flew by or orbited Mars. For more, you can look up Mars landing and Mars rover missions.
Early Soviet Missions

1960s
Between 1960 and 1969, the Soviet Union tried to send nine probes to Mars. All of them failed. Some failed at launch, others couldn't reach Earth orbit, and some broke down on the way to Mars.
The Mars 1M program was the first Soviet attempt to explore other planets. Two probes, Mars 1960A and Mars 1960B, were launched in October 1960. Both failed to reach orbit.
Later, Mars 1962A (a fly-by mission) and Mars 1962B (a lander mission) were launched in 1962. Both also failed.
The First Success
NASA launched an orbiter on November 28, 1964. This was Mariner 4. It flew past Mars on July 14, 1965. It took 21 photos before it stopped working.
Mars 1 was a Soviet probe launched on November 1, 1962. It was the first Soviet probe to reach interplanetary space. It was supposed to fly within 11,000 km of Mars and take pictures. It also gathered data on space radiation and Mars' magnetic field. Communications stopped on March 21, 1963, when it was very far from Earth.
In 1964, two more Soviet probes, Zond 1964A and Zond 2, failed. Zond 1964A failed at launch. Zond 2 lost communication on its way to Mars.
In 1969, the Soviet Union tried to launch two more orbiters, Mars 1969A and Mars 1969B. Both were lost due to problems with their new Proton rockets.
1970s
The USSR wanted to be the first to put a satellite around Mars. In May 1971, Cosmos 419 failed to launch. Then, Mars 2 and Mars 3 were successfully launched later that month. They were designed with both an orbiter and a lander.
On November 27, 1971, the Mars 2 lander crash-landed on Mars. It was the first human-made object to reach the Martian surface. On December 2, 1971, the Mars 3 lander made the first successful soft landing. However, it stopped sending data after only 14.5 seconds.
The Mars 2 and 3 orbiters sent back a lot of data and 60 pictures. This information helped scientists create maps of Mars and learn about its gravity and magnetic fields.
In 1973, the Soviet Union sent four more probes: Mars 4 and Mars 5 (orbiters), and Mars 6 and Mars 7 (fly-by/lander combinations). Most of these missions sent back some data, with Mars 5 being the most successful. Mars 5 sent 60 images before it stopped working. Mars 6's lander sent data during its descent but failed on impact. Mars 4 flew by Mars and sent back pictures. Mars 7 missed the planet completely.
Mariner Program
.jpg)
In 1964, NASA tried to reach Mars with two identical spacecraft, Mariner 3 and Mariner 4. Mariner 3 failed at launch. But Mariner 4 launched successfully on November 28, 1964. It traveled for 7.5 months to Mars.
Mariner 4 flew past Mars on July 14, 1965. It sent back the first close-up photos of another planet. The pictures showed many impact craters. It also gave much more accurate information about Mars. Scientists learned that Mars has a very thin atmosphere (about 1% of Earth's) and very cold daytime temperatures. No magnetic field was found. This new data meant that future Mars landers had to be redesigned. It also showed that life would have a harder time surviving there than first thought.

NASA continued the Mariner program with Mariner 6 and 7 in 1969. Then, Mariner 9 successfully entered orbit around Mars in 1971. It was the first spacecraft ever to orbit another planet! When Mariner 9 arrived, a planet-wide dust storm was happening. Mission controllers waited for the storm to clear. During this time, the probe took pictures of Mars' moon, Phobos.
When the dust storm cleared, Mariner 9 sent back amazing pictures. These photos were the first to show that liquid water might have flowed on Mars' surface long ago. They also helped scientists understand many features on Mars. For example, Nix Olympica, which was one of the few features seen during the dust storm, was found to be the highest mountain (a volcano) in the entire Solar System. It was then renamed Olympus Mons.
Viking Program
The Viking program launched Viking 1 and Viking 2 to Mars in 1975. This program included two orbiters and two landers. They were the first two spacecraft to successfully land and work on Mars.
 Viking 1 lander site (first color image, July 21, 1976).
 Viking 2 lander site (first color image, September 5, 1976).
 Viking 2 lander site (September 25, 1977).
 Frost at Viking 2 site (May 18, 1979).
 Martian sunset at Viking 1 site (August 20, 1976).
|
The main goals of the landers were to look for signs of life and study Mars' weather, ground movement, and magnetic properties. The results from the biological experiments were not clear. However, a new look at the data in 2012 suggested there might have been signs of microbial life on Mars.
 Flood erosion at Dromore crater.
 Tear-drop shaped islands.
 Streamlined islands in Lunae Palus.
 Scour patterns.
|
The Viking orbiters showed that huge floods of water once carved deep valleys and channels on Mars. Areas with branched streams in the southern part of Mars suggest that rain might have fallen there a long time ago.
Mars Pathfinder

Mars Pathfinder was a U.S. spacecraft that landed on Mars on July 4, 1997. It had a base station and a small, wheeled robotic rover named Sojourner. Sojourner was the first rover to drive on the surface of Mars!
Besides its science goals, Mars Pathfinder also tested new technologies. These included an airbag landing system and automatic obstacle avoidance. These technologies were later used by the Mars Exploration Rovers.
Mars Global Surveyor

After NASA's Mars Observer orbiter failed in 1992, NASA launched Mars Global Surveyor (MGS). It launched on November 7, 1996, and entered Mars' orbit on September 12, 1997. After shaping its orbit, it began its main mapping mission in March 1999. It studied Mars from a low, nearly polar orbit for one Martian year (almost two Earth years). MGS finished its main mission in January 2001 and continued with several extended missions.
This mission studied the entire Martian surface, atmosphere, and inside. It sent back more data about Mars than all previous missions combined! All this data is available to the public.

One key finding from Global Surveyor was pictures of gullies and debris flows. These suggest there might be current sources of liquid water, like an aquifer, near the surface of Mars. On Earth, similar channels are formed by flowing water. But on Mars, it's usually too cold and the atmosphere is too thin for liquid water to last. Still, many scientists think that underground water can sometimes come to the surface, create gullies, and then freeze or evaporate.
The mission also found that Mars' magnetic field is not global. Instead, it's found only in certain areas of the crust. New temperature data and close-up images of Mars' moon Phobos showed that its surface is covered in powdery material at least 1 meter thick. This is from millions of years of meteoroid impacts. Data from the spacecraft's laser altimeter gave scientists their first 3D views of Mars' north polar ice cap. MGS lost contact with Earth on November 5, 2006, and NASA stopped trying to reach it in January 2007.
Mars Odyssey and Mars Express
In 2001, NASA's Mars Odyssey orbiter arrived at Mars. Its job is to use special tools to look for signs of past or present water and volcanic activity. In 2002, it was announced that the probe found large amounts of hydrogen. This means there are huge deposits of water ice in the top three meters of Mars' soil near the south pole.
On June 2, 2003, the European Space Agency's Mars Express launched from Baikonur Cosmodrome. Mars Express has an orbiter and a lander called Beagle 2. The lander had a digging tool and a very small mass spectrometer. These tools were on a robotic arm to analyze the soil for signs of life.
The orbiter entered Mars' orbit on December 25, 2003. Beagle 2 entered Mars' atmosphere the same day. But attempts to contact the lander failed. Beagle 2 was declared lost in February. The Mars Express Orbiter confirmed water ice and carbon dioxide ice at Mars' south pole. NASA had already confirmed them at the north pole.
The lander's fate was a mystery until it was found intact on Mars' surface in images from the Mars Reconnaissance Orbiter. The pictures showed that two of its four solar panels didn't open. This blocked the communication antenna. Beagle 2 was the first British and first European probe to make a soft landing on Mars.
MER and Phoenix

NASA's Mars Exploration Rover Mission (MER) started in 2003. It involved two rovers, Spirit and Opportunity, exploring Mars' surface. Their goal was to find and study rocks and soils that could tell us about past water activity on Mars. This mission was part of NASA's Mars Exploration Program, which also included the two Viking landers in 1976 and Mars Pathfinder in 1997.
Mars Reconnaissance Orbiter
The Mars Reconnaissance Orbiter (MRO) is a spacecraft designed to explore Mars from orbit. This $720 million spacecraft was built by Lockheed Martin and managed by the Jet Propulsion Laboratory. It launched on August 12, 2005, and entered Mars' orbit on March 10, 2006.
MRO carries many science tools, like the HiRISE camera. The HiRISE camera takes very detailed pictures of Mars' surface. Other tools can find water, ice, and minerals on and below the surface. MRO also helps future missions by watching Martian weather and surface conditions daily. It looks for future landing sites and tests a new communication system. This system allows it to send and receive information much faster than previous Mars spacecraft. It also acts as an important relay satellite for other missions.
Rosetta and Dawn Flybys
The ESA's Rosetta space probe flew within 250 km of Mars on February 25, 2007. It used Mars' gravity to change its speed and direction. This helped it on its way to a comet.
NASA's Dawn spacecraft also used Mars' gravity in 2009. This helped it change direction and speed on its way to Vesta (a large asteroid). Dawn also tested its cameras and other tools on Mars.
Fobos-Grunt
On November 8, 2011, Russia launched an ambitious mission called Fobos-Grunt. It was supposed to bring a sample back to Earth from Mars' moon Phobos. It also carried the Chinese Yinghuo-1 probe to orbit Mars. However, Fobos-Grunt had a complete failure shortly after launch. It got stuck in low Earth orbit and later fell back to Earth. Both the Yinghuo-1 satellite and Fobos-Grunt burned up in the atmosphere on January 15, 2012, over the Pacific Ocean.
Curiosity Rover

The NASA Mars Science Laboratory mission, with its rover named Curiosity, launched on November 26, 2011. It landed on Mars on August 6, 2012, in Gale Crater. The rover has tools designed to look for signs that Mars could have supported life in the past or present.
MAVEN
NASA's MAVEN is an orbiter mission that studies the upper atmosphere of Mars. It also acts as a communication relay satellite for robotic landers and rovers on Mars' surface. MAVEN launched on November 18, 2013, and reached Mars on September 22, 2014.
Mars Orbiter Mission
The Mars Orbiter Mission, also called Mangalyaan, was launched on November 5, 2013, by the Indian Space Research Organisation (ISRO). It successfully entered Mars' orbit on September 24, 2014. This mission was a test of technology. Its secondary goal was to study the Martian atmosphere. This was India's first mission to Mars. With it, ISRO became the fourth space agency to successfully reach Mars. It was also the second space agency to reach Mars orbit on its first try. This mission was completed on a very low budget of $71 million, making it the cheapest Mars mission to date.
Trace Gas Orbiter and EDM
The ExoMars Trace Gas Orbiter is an atmospheric research orbiter. It was built by ESA and Roscosmos together. It entered Mars orbit on October 19, 2016. Its goal is to better understand methane and other gases in Mars' atmosphere. These gases could be signs of possible biological or geological activity.
The Interior Exploration using Seismic Investigations, Geodesy and Heat Transport (InSight) mission is a robotic lander. It was designed to study the deep inside of Mars. It launched on May 5, 2018, and successfully landed on Mars on November 26, 2018. InSight traveled 483 million km (300 million miles) to get there.
InSight and MarCO
In August 2012, NASA chose InSight for a $425 million lander mission. It has a heat flow probe and a seismometer to find out about Mars' deep interior structure. Two small CubeSats called MarCO launched with InSight on May 5, 2018. They provided real-time updates during InSight's landing. The CubeSats separated from the rocket and traveled their own paths to Mars. InSight landed successfully on Mars on November 26, 2018.
Hope
The United Arab Emirates launched the Hope Mars Mission in July 2020. It successfully entered orbit on February 9, 2021. It is studying the Martian atmosphere and weather.
Tianwen-1 and Mars 2020
Tianwen-1 is a Chinese mission launched on July 23, 2020. It includes an orbiter, a lander, and a small rover. The orbiter entered Mars' orbit on February 10, 2021. The lander and rover are planned to land in May 2021.
The Mars 2020 mission by NASA launched on July 30, 2020. It is based on the Mars Science Laboratory design. Its science goals focus on astrobiology (the study of life in the universe). It includes the Perseverance rover and the Mars Helicopter Ingenuity.
After traveling 293 million miles for over six months, Perseverance successfully landed on February 18, 2021. Its first mission is planned for almost two years. It will search for signs of ancient life and explore Mars' surface.
Future Missions

Missions launched to Mars in the summer of 2020 include the Hope Orbiter and Tianwen-1.
- As part of the ExoMars program, the ESA and Roscosmos plan to send the Rosalind Franklin rover in 2022. It will search for signs of past or present tiny life on Mars. The lander that will deliver the rover is called Kazachok.
- India's ISRO plans a follow-up mission to its Mars Orbiter Mission in 2024. It's called Mars Orbiter Mission 2 (MOM-2). It will have an orbiter and likely a rover.
Ideas for Future Missions
- The Finnish-Russian Mars MetNet idea would use many small weather stations on Mars. These would create a wide network to study Mars' atmosphere and weather.
- The Mars-Grunt is a Russian idea for a mission to bring a sample of Martian soil back to Earth.
- ESA and NASA have an idea for a Mars sample return mission. It would use a rover to collect small samples, a special rocket to send them into orbit, and an orbiter to pick them up and bring them to Earth.
- The JAXA is working on a mission idea called MELOS rover. It would look for signs of existing life on Mars.
Other future mission ideas include probes for the poles, Martian aircraft, and a network of small weather stations. Long-term studies might look at Martian lava tubes and how to use Mars' resources. Small missions, like sending a tiny spacecraft on a larger rocket, are also possible.
Human Missions to Mars

Sending humans to Mars has been a dream since the early days of space travel. Many plans are active right now, both from governments and private companies. They aim to put humans on Mars within the next 10 to 30 years.
NASA's Plans

In 2004, then-US President George W. Bush announced that sending humans to Mars was a long-term goal for the United States. NASA planned to use the Orion spacecraft to send people to Earth's Moon by 2020. This would be a step towards a Mars trip. On September 28, 2007, NASA said it aimed to put a person on Mars by 2037.
On December 2, 2014, NASA announced support for a Boeing plan for an "Affordable Mars Mission Design." This plan included radiation shielding and artificial gravity. If enough money was available, this mission could happen in the early 2030s.
On October 8, 2015, NASA shared its official plan for human exploration and settlement of Mars, called "Journey to Mars." This plan has three main stages:
- The first stage, "Earth Reliant," is happening now. It uses the International Space Station until 2024. It tests deep space technologies and studies how long space missions affect the human body.
- The second stage, "Proving Ground," moves away from relying on Earth. It involves tasks in space around the Moon. NASA plans to capture an asteroid (planned for 2020), test deep space living spaces, and test skills needed for human Mars exploration.
- The last stage, "Earth Independent," is about becoming independent from Earth's resources. This includes long missions on the Moon, using habitats that only need regular care. It also means using Martian resources for fuel, water, and building materials. NASA still aims for human missions to Mars in the 2030s.
{{wide image|NASA-JourneyToMars-ScienceExplorationTechnology-20141202.jpg|600px|Journey to Mars – Science, Exploration, Technology.]] On August 28, 2015, NASA funded a year-long simulation. Six scientists lived in a special dome in Hawaii to study what a year-long Mars mission would be like. They had limited contact with the outside world and only went outside wearing spacesuits.
NASA's human Mars exploration plans have changed over time. In 2017, NASA's focus shifted to returning to the Moon by 2024 with the Artemis program. A flight to Mars could follow after this project.
SpaceX's Plans
The private company SpaceX has a long-term goal: to make regular flights to Mars possible for colonization. To do this, the company is building Starship. This spacecraft can carry people to Mars and other planets. It also has a booster called Super Heavy. In 2017, SpaceX announced plans to send two uncrewed Starships to Mars by 2022. This would be followed by two more uncrewed flights and two crewed flights in 2024. Starship is designed to carry at least 100 tonnes of cargo. It will use a mix of air braking and rocket power to land. It will also use fuel made on Mars. As of early 2021, several Starship prototypes have been tested successfully. Starship SN8, for example, had a partly successful test flight in December 2020. It flew up and down well, but crashed on landing due to a fuel tank issue. A similar landing method is planned for Mars.
Zubrin's Plan
Mars Direct is a low-cost human mission idea proposed by Robert Zubrin. He is the founder of the Mars Society. This plan would use powerful rockets, like the Ares V, to avoid building things in orbit or using fuel depots on the Moon. A changed version of this plan, called "Mars to Stay", suggests that the first explorers might not return to Earth.
Images for kids
-
Self-portrait of Perseverance rover and Ingenuity helicopter (to the left) at Wright Brothers Field (April 7, 2021).
-

A 19th-century map by Giovanni Schiaparelli, a modern photo, and a blended image in the middle.
-

Mars Landing Sites (December 16, 2020).
-
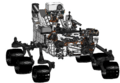
A diagram of the Curiosity rover, which landed on Mars in 2012.
-
Animation of 2001 Mars Odysseys path around Mars from October 24, 2001, to October 24, 2002.
-
Animation of Mars Expresss path around Mars from December 25, 2003, to January 1, 2010.
-

Slope streaks as seen by HiRISE.
-

NASA missions to Mars (September 28, 2021) (Perseverance rover; Ingenuity Mars helicopter; InSight lander; Odyssey orbiter; MAVEN orbiter; Curiosity rover; Mars Reconnaissance Orbiter).
-

Map showing Perseverances collected samples.
-

Deep Space 2 technology.










See also
 In Spanish: Exploración de Marte para niños
In Spanish: Exploración de Marte para niños
